Tutorials
Tutorials of RTAB-Map. Installation instructions can be found here.
-
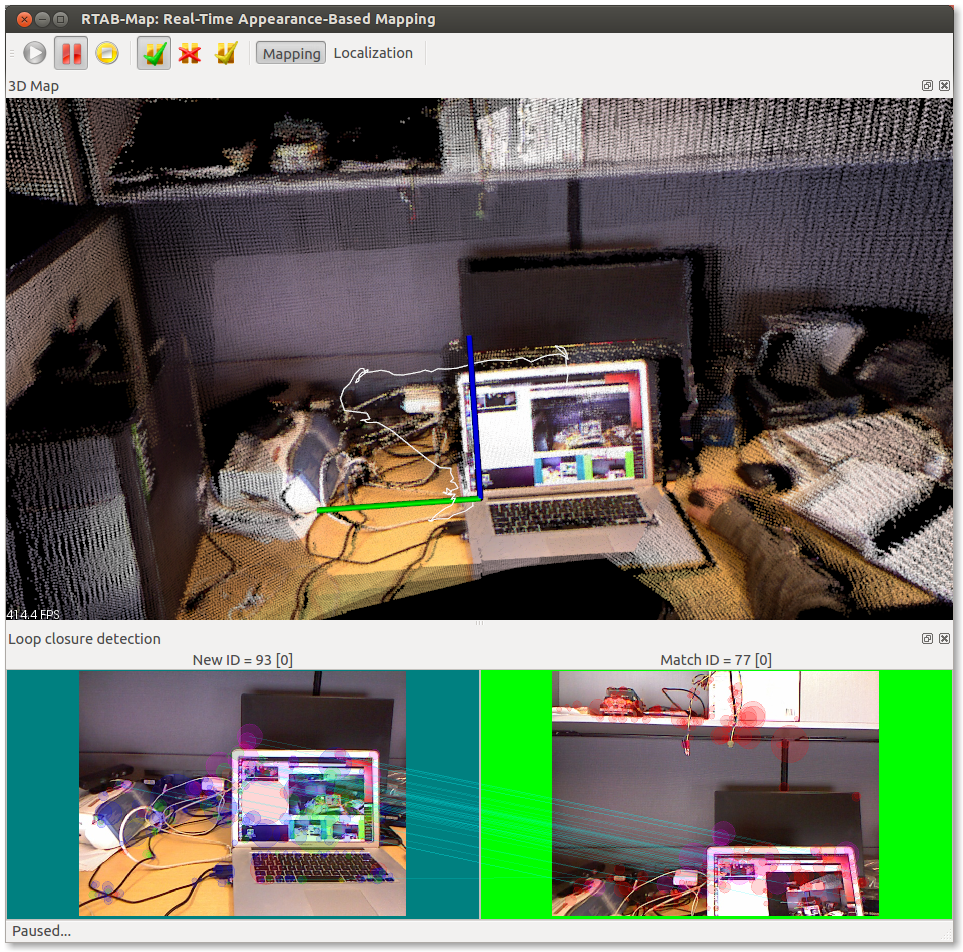
This tutorial shows how to use RTAB-Map out-of-the-box to map an environment using a hand-held Kinect.
-
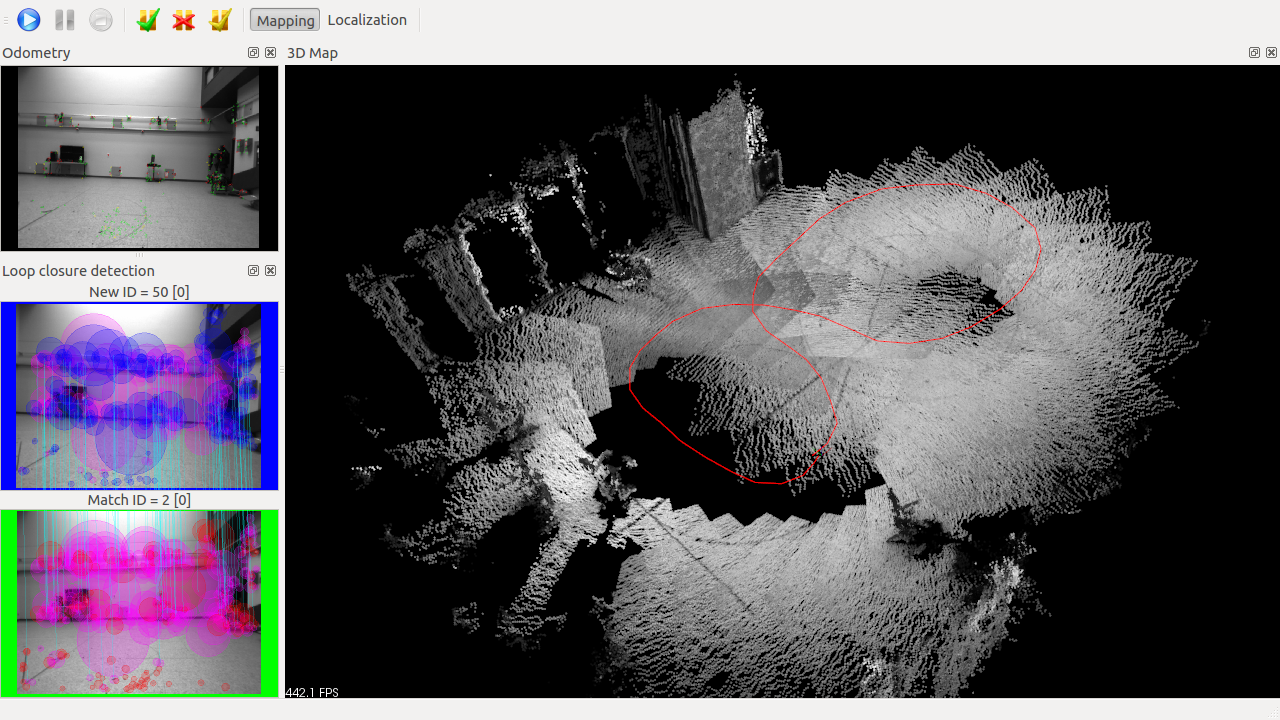
This tutorial shows how to use RTAB-Map to map an environment using a hand-held Stereo camera.
-
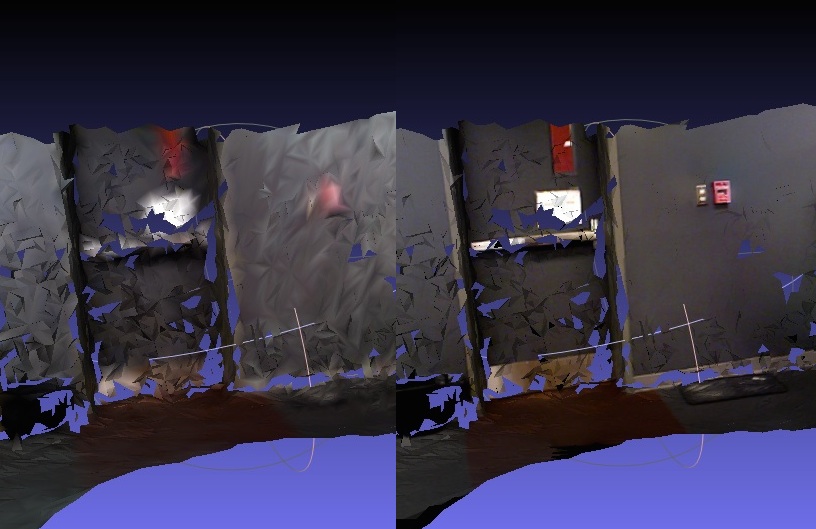
This tutorial shows how to export a low resolution mesh from RTAB-Map to MeshLab with corresponding camera textures. In MeshLab, we can then create a texture for the mesh from the exported cameras.
-
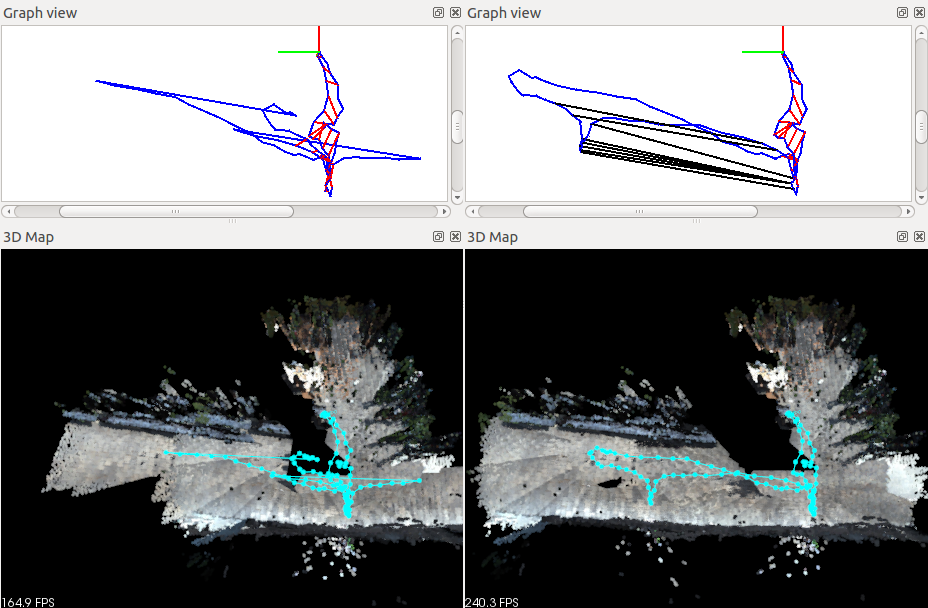
This example shows how to activate robust graph optimization.
-
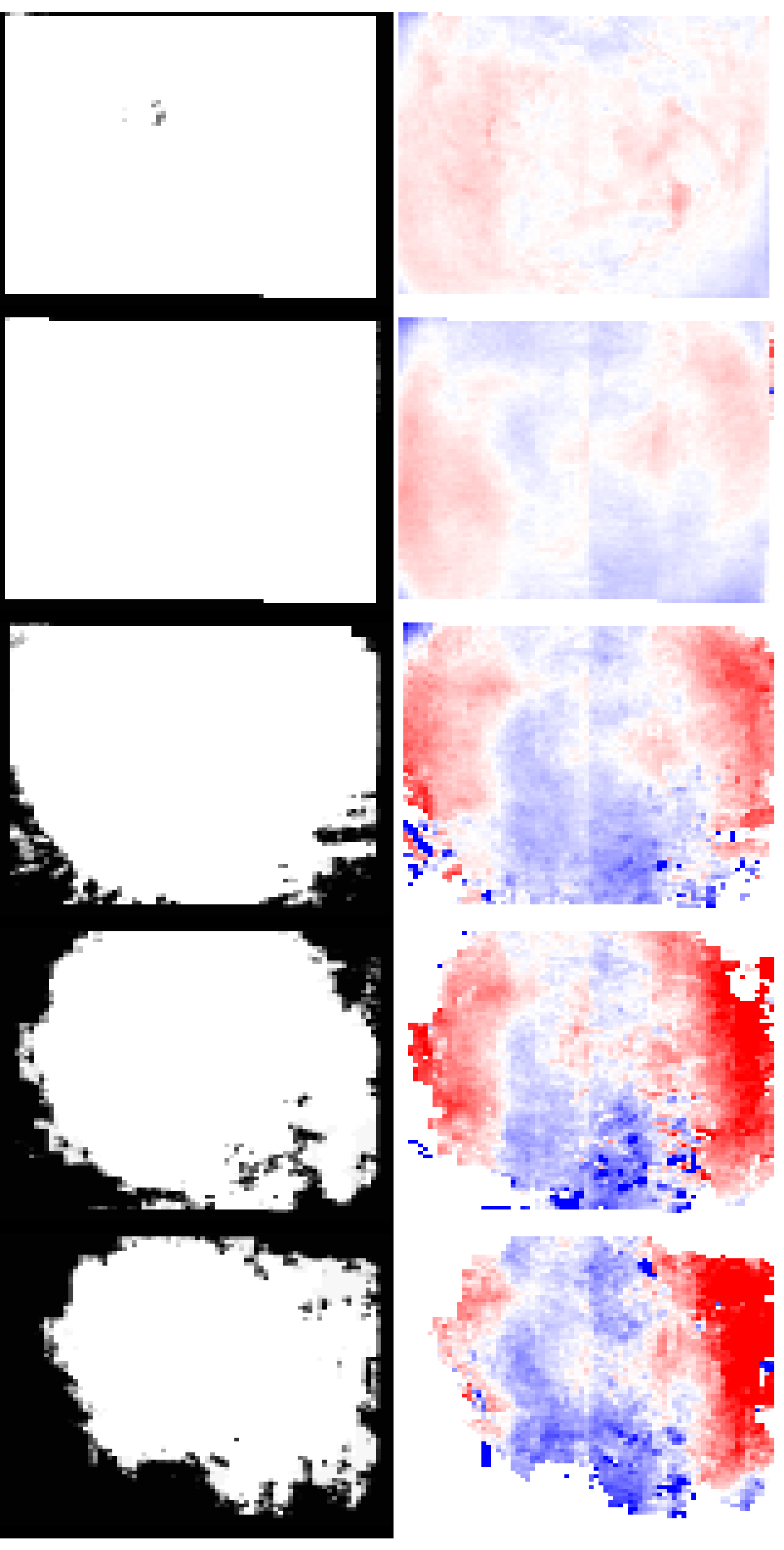
This example shows how calibrate the depth images to reduce distorsion at longer range.
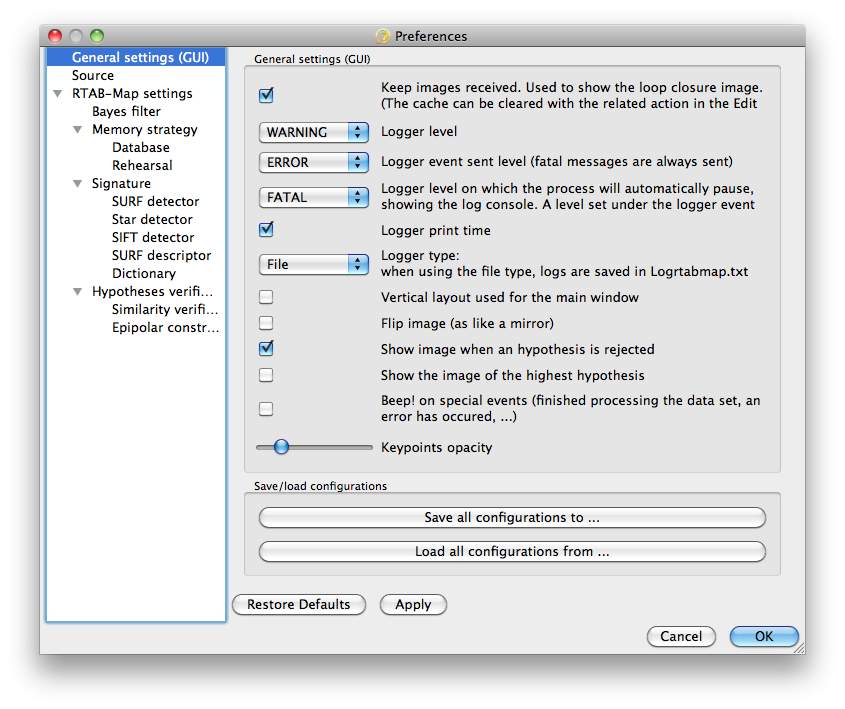
- This example shows how to change most used RTAB-Map's parameters.
-
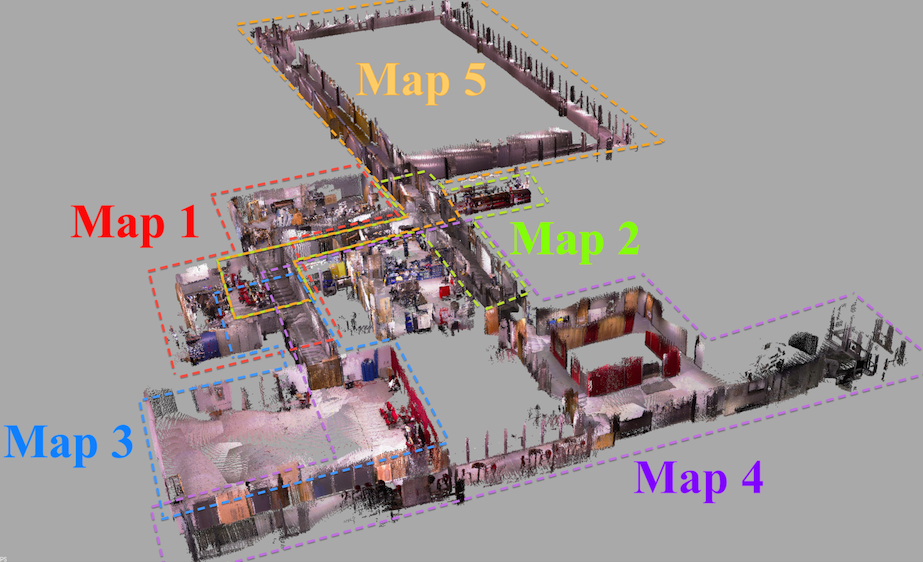
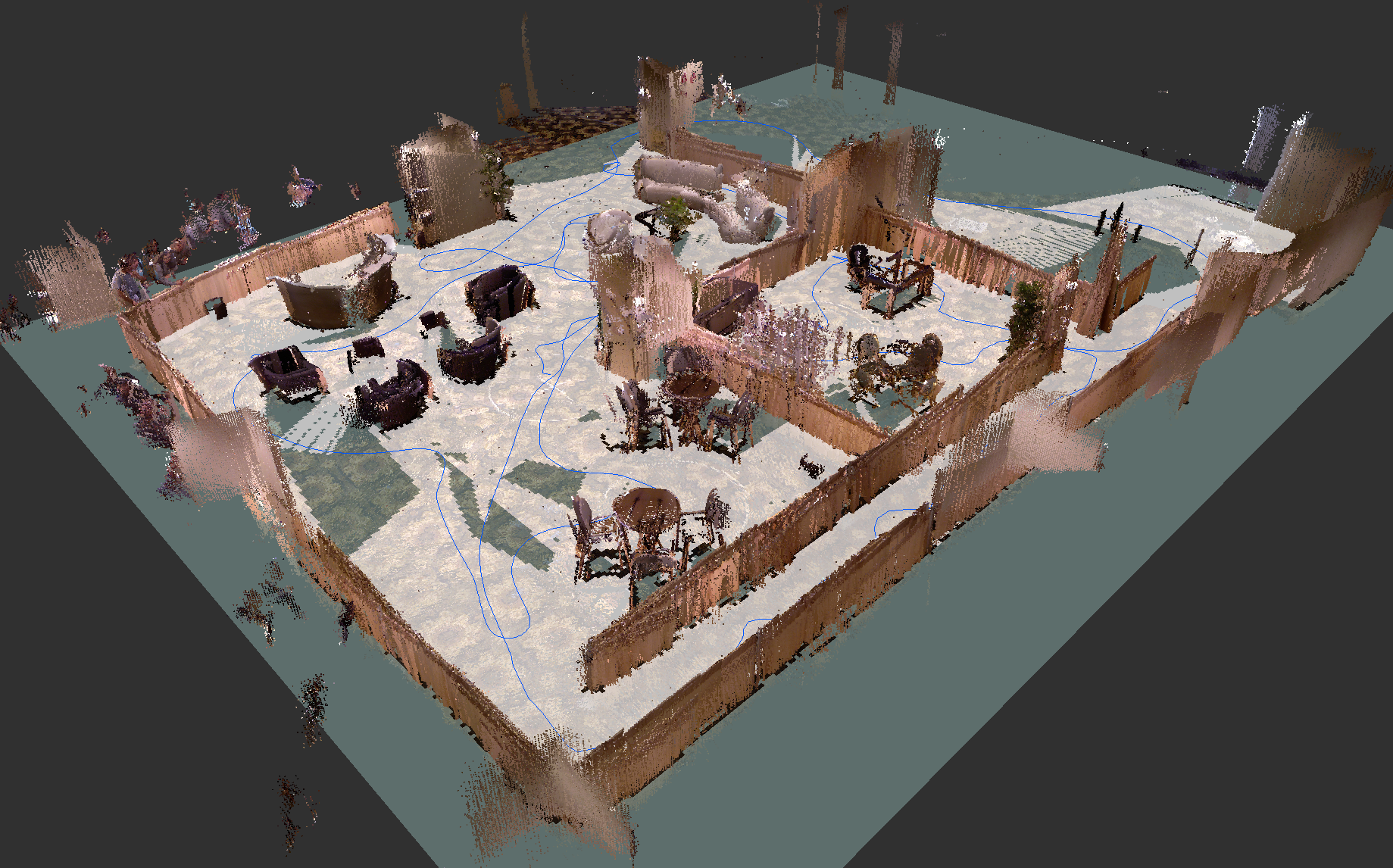
This tutorial shows a demonstration with real robot data for multi-session mapping. It is the data used in the paper "Online Global Loop Closure Detection for Large-Scale Multi-Session Graph-Based SLAM".
- This tutorial shows how to merge multiple scans taken with RTAB-Map Tango.

-
This simple example shows how to process your own data set (images-only) with RTAB-Map.
-
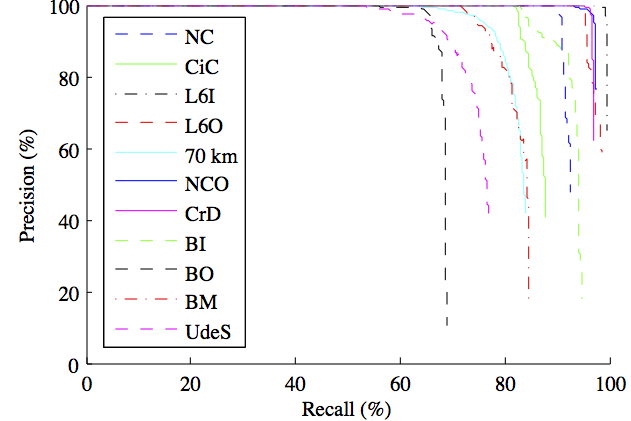
This tutorial shows how to use rtabmap-console tool to process all data sets in the paper "Appearance-Based Loop Closure Detection for Online Large-Scale and Long-Term Operation", then using MATLAB and ground truth files to show Precision/Recall curves.
-
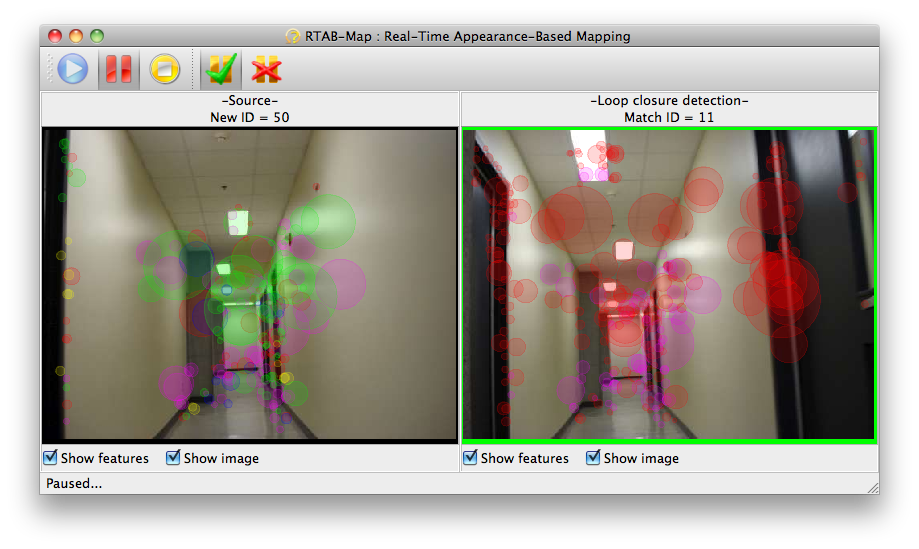
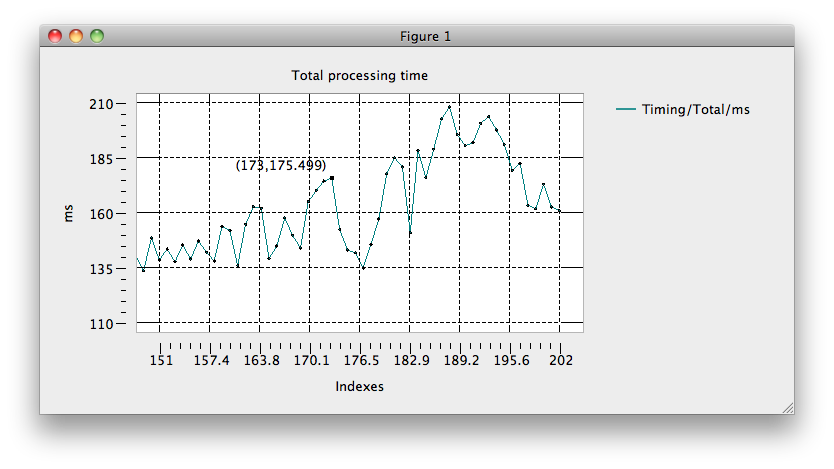
This tutorial will show the power of GUI for online monitoring of the core process.
-
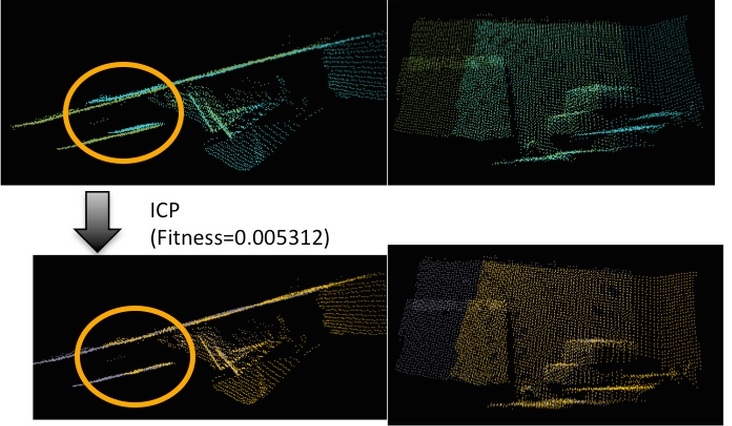
This tutorial discusses about ICP.
-
This is more a example case than a tutorial but it shows how RTAB-Map was configured to be part of the winner's solution of the contest.
How to use RTAB-Map library in your C++ project.